
在具身智能浪潮席卷全球的背景下,機器人控制器的性能成為決定其智能化水平的關鍵。阿普奇具身智能機器人KiWiBot系列控制器,通過創新性的國產化設計與“大小腦”協同控制架構,為高精度運動控制提供了突破性解決方案。

技術迭代:體積與性能雙突破
具身機器人對控制器提出了小體積、高性能、高集成、高穩定、高實時、低噪音等嚴苛要求。阿普奇KiWiBot系列控制器經過三代技術演進,逐步解決了傳統控制器的痛點:
第二代控制器在保持X86+Orin架構基礎上,實現了型號多樣、選型靈活、擴展性強和體積小巧的優勢。
第三代控制器進一步優化整體性能,連接器采用車載線束方案,顯著提升可靠性。

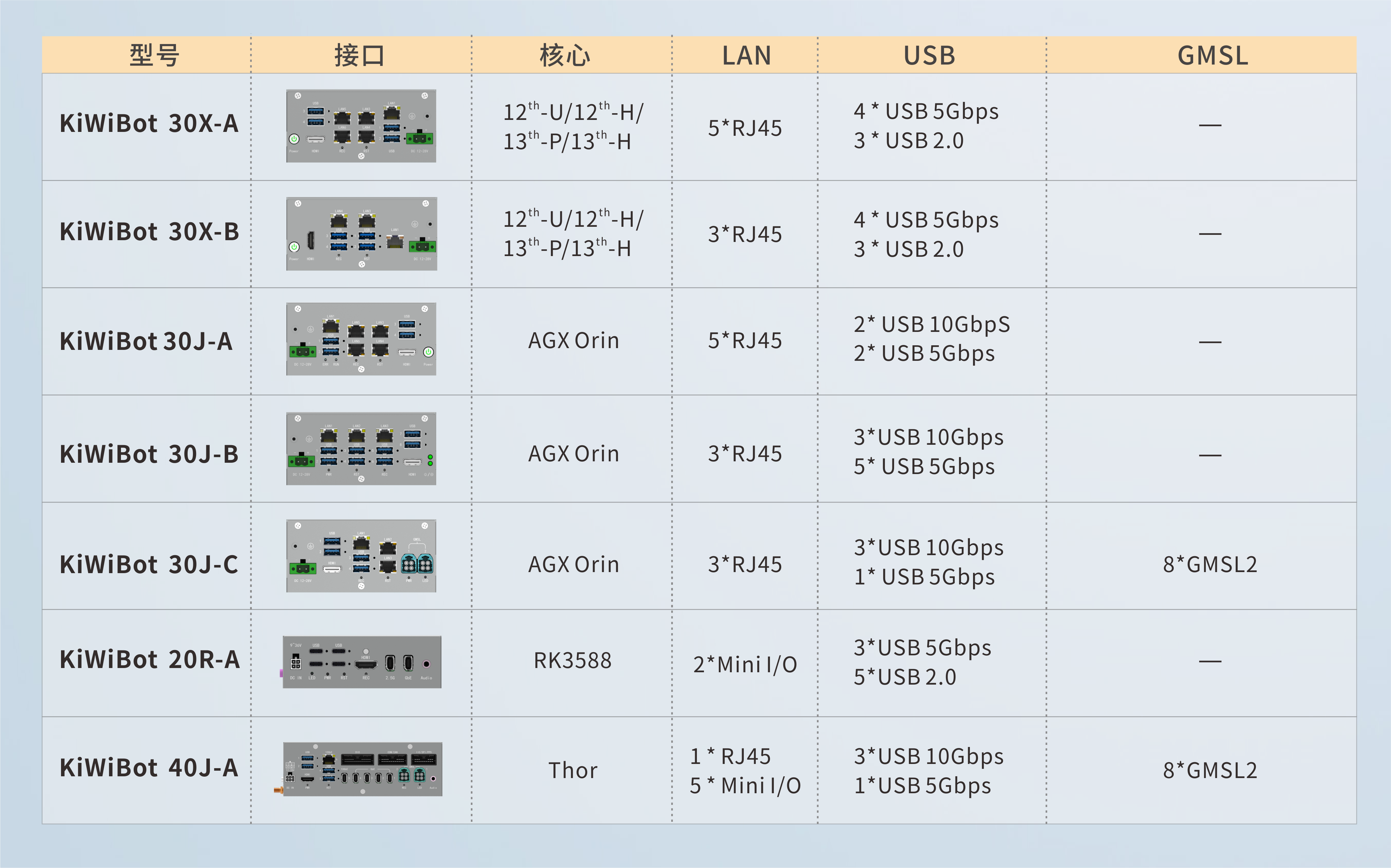
“核心大小腦”控制器型號推薦:
四種安裝模式:靈活適配場景
控制器提供四種安裝方式,確保在各種應用場景下的最佳適配:
● 帶殼安裝:增強結構強度與抗沖擊能力,提升環境防護性能
● 不帶殼安裝:巴掌大小理想尺寸,三重散熱系統保障靜音穩定運行
● 并排安裝:結構堅固,維護便捷
● 堆疊安裝:高度集成,節省空間,適合空間受限場景
全系列采用工業級設計,具備優異的環境適應性與擴展靈活性。

核心優勢:賦能精準運動控制
該控制器的核心優勢體現在卓越的實時性能與精確的時間同步能力,為高精度運動控制提供關鍵支撐。無論是在移動機器人、工業自動化還是特種應用中,均能保證穩定可靠的運行表現。
其具備強大的電磁兼容(EMC)與抗干擾能力,結合優良的抗振動性能,確保在復雜電磁環境下穩定運行。模塊化設計實現各部件獨立工作,顯著提升系統可靠性與可維護性。

隨著機器人產業向高精度、柔性化方向發展,運動控制架構正經歷從集中處理向分布式協同的重要演進。阿普奇KiWiBot控制器通過國產化設計與”大小腦”協同架構創新,不僅解決了高精度控制難題,更為產業提供了自主可控的技術底座,為中國在全球具身智能競爭中開辟了新的技術路徑。
發布時間: 11-14-2025


